

在本系列文章中,我们将为读者深入讲解三星手机的内核防护技术。在上一篇文章中,我们为读者介绍了系统的初始化过程,以及应用程序的初始化过程。在本文中,将继续为读者呈现更多精彩内容!
(接上文)
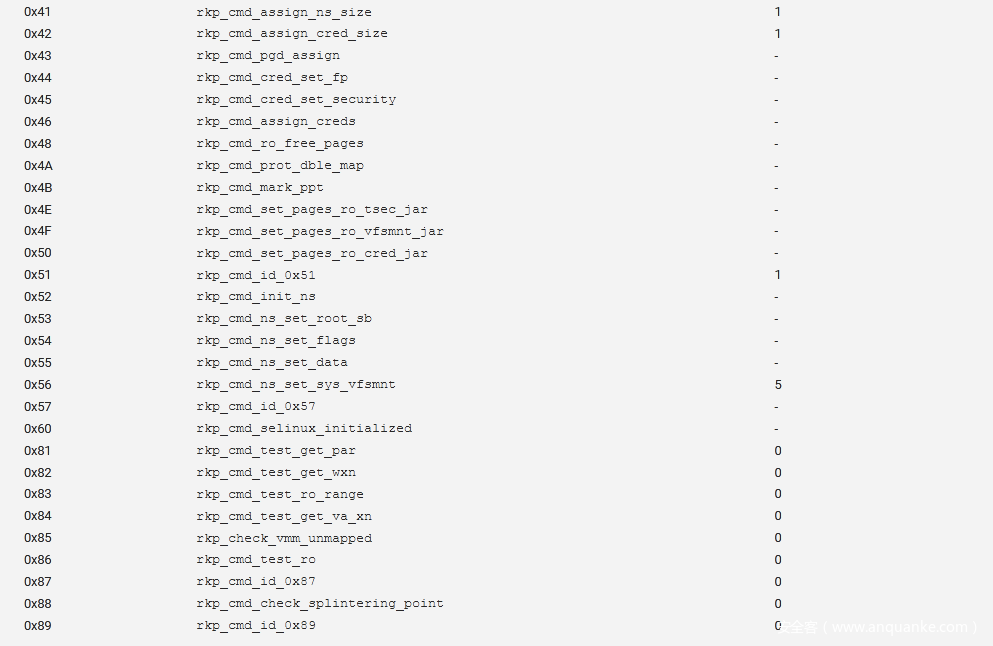
APP_RKP
为APP_RKP注册的命令处理程序包括:
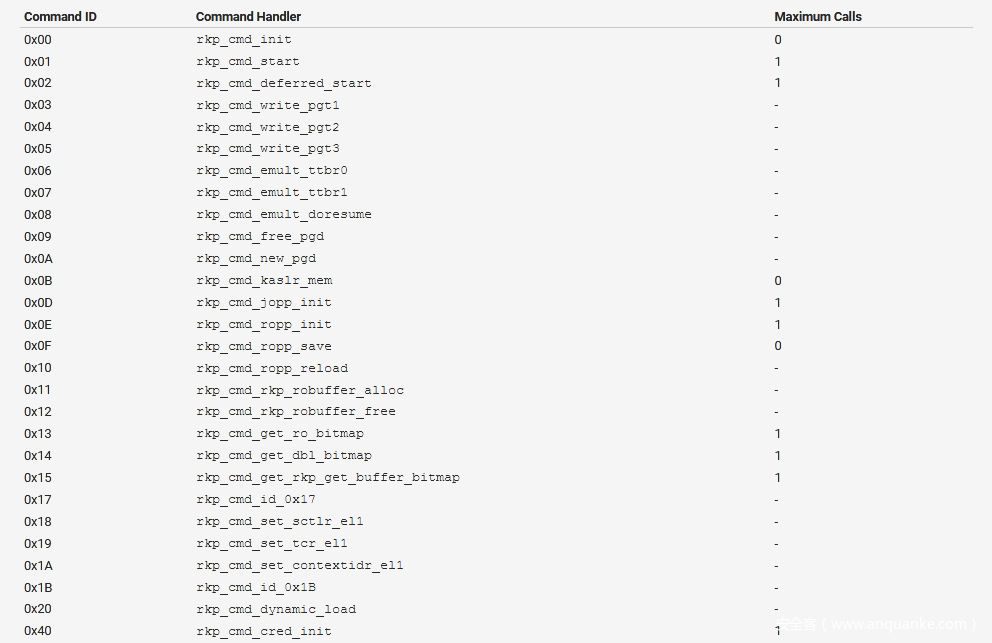
让我们来看看uH在启动过程中调用的命令#0(command #0)。
int64_t rkp_cmd_init() {
rkp_panic_on_violation = 1;
rkp_init_cmd_counts();
cs_init(&rkp_start_lock);
return 0;
}实际上,APP_RKP的命令#0处理程序也非常简单:它通过调用rkp_init_cmd_counts来设置一个命令的最大调用次数(由“检查器”函数强制执行),并初始化“start”和“deferred start”命令所使用的临界区段(后面会详细介绍)。
异常处理
管理程序的一个重要组成部分就是其异常处理代码。这些处理函数要在内核非法内存访问、内核执行HVC指令时等被调用。通过查看VBAR_EL2寄存器中指定的向量表就能找到这些函数。我们在vmm_init中已经看到,这些向量表位于vmm_vector_table中;从ARMv8的规范来看,其结构如下所示:
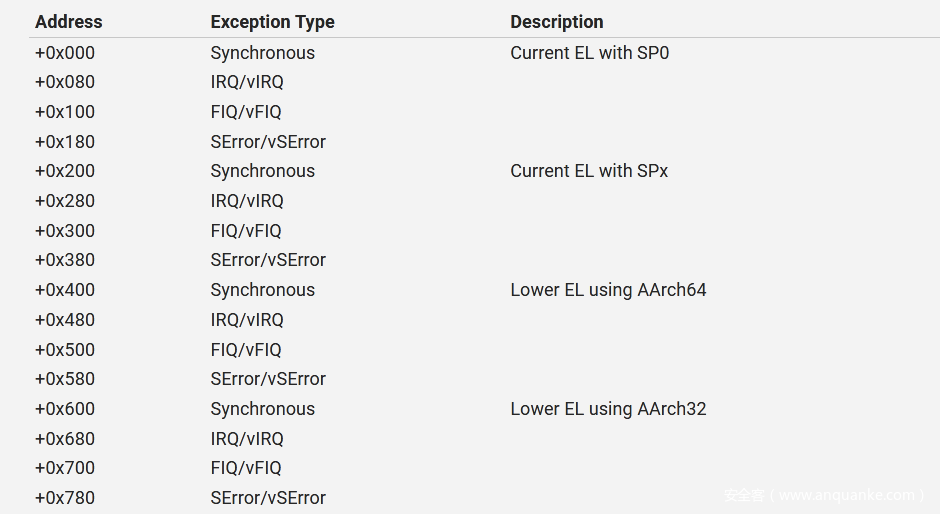
我们的设备上使用的是一个运行在EL1上的64位内核,所以命令调度将交由vmm_vector_table+0x400处的异常处理程序完成,但所有的处理程序最终还是会调用相同的函数:
void exception_handler(...) {
// ...
// Save registers x0 to x30, sp_el1, elr_el2, spsr_el2
// ...
vmm_dispatch(<level>, <type>, ®s);
asm("clrex");
asm("eret");
}vmm_dispatch作为参数给出了已经发生的异常的级别和类型。
int64_t vmm_dispatch(int64_t level, int64_t type, saved_regs_t* regs) {
// ...
if (has_panicked)
vmm_panic(level, type, regs, "panic on another core");
switch (type) {
case 0x0:
if (vmm_synchronous_handler(level, type, regs))
vmm_panic(level, type, regs, "syncronous handler failed");
break;
case 0x80:
uh_log('D', "vmm.c", 1132, "RKP_e3b85960");
break;
case 0x100:
uh_log('D', "vmm.c", 1135, "RKP_6d732e0a");
break;
case 0x180:
uh_log('D', "vmm.c", 1149, "RKP_3c71de0a");
break;
default:
return 0;
}
return 0;
}在出现同步异常的情况下,vmm_dispatch函数将调用vmm_synchronous_handler函数。
int64_t vmm_synchronous_handler(int64_t level, int64_t type, saved_regs_t* regs) {
// ...
esr_el2 = get_esr_el2();
switch (esr_el2 >> 26) {
case 0x12: /* HVC instruction execution in AArch32 state */
case 0x16: /* HVC instruction execution in AArch64 state */
if ((regs->x0 & 0xFFFFF000) == 0xC300C000) {
cmd_id = regs->x1;
app_id = regs->x0;
cpu_num = get_current_cpu();
if (cpu_num <= 7)
uh_state.injections[cpu_num] = 0;
uh_handle_command(app_id, cmd_id, regs);
}
return 0;
case 0x18: /* Trapped MSR, MRS or Sys. ins. execution in AArch64 state */
if ((esr_el2 & 1) == 0 && !other_msr_mrs_system(®s->x0, esr_el2_1 & 0x1FFFFFF))
return 0;
vmm_panic(level, type, regs, "other_msr_mrs_system failure");
return 0;
case 0x20: /* Instruction Abort from a lower EL */
cs_enter(&s2_lock);
el1_va_to_ipa(get_elr_el2(), &ipa);
get_s2_1gb_page(ipa, &fld);
print_s2_fld(fld);
if ((fld & 3) == 3) {
get_s2_2mb_page(ipa, &sld);
print_s2_sld(sld);
if ((sld & 3) == 3) {
get_s2_4kb_page(ipa, &tld);
print_s2_tld(tld);
}
}
cs_exit(&s2_lock);
if (should_skip_prefetch_abort() == 1)
return 0;
if (!esr_ec_prefetch_abort_from_a_lower_exception_level("-snip-")) {
print_vmm_registers(regs);
return 0;
}
vmm_panic(level, type, regs, "esr_ec_prefetch_abort_from_a_lower_exception_level");
return 0;
case 0x21: /* Instruction Abort taken without a change in EL */
uh_log('L', "vmm.c", 920, "esr abort iss: 0x%x", esr_el2 & 0x1FFFFFF);
vmm_panic(level, type, regs, "esr_ec_prefetch_abort_taken_without_a_change_in_exception_level");
case 0x24: /* Data Abort from a lower EL */
if (!rkp_fault(regs))
return 0;
if ((esr_el2 & 0x3F) == 7)// Translation fault, level 3
{
va = rkp_get_va(get_hpfar_el2() << 8);
cs_enter(&s2_lock);
res = el1_va_to_pa(va, &ipa);
if (!res) {
uh_log('L', "vmm.c", 994, "Skipped data abort va: %p, ipa: %p", va, ipa);
cs_exit(&s2_lock);
return 0;
}
cs_exit(&s2_lock);
}
if ((esr_el2 & 0x7C) == 76)// Permission fault, any level
{
va = rkp_get_va(get_hpfar_el2() << 8);
at_s12e1w(va);
if ((get_par_el1() & 1) == 0) {
print_el2_state();
invalidate_entire_s1_s2_el1_tlb();
return 0;
}
}
el1_va_to_ipa(get_elr_el2(), &ipa);
get_s2_1gb_page(ipa, &fld);
print_s2_fld(fld);
if ((fld & 3) == 3) {
get_s2_2mb_page(ipa, &sld);
print_s2_sld(sld);
if ((sld & 3) == 3) {
get_s2_4kb_page(ipa, &tld);
print_s2_tld(tld);
}
}
if (esr_ec_prefetch_abort_from_a_lower_exception_level("-snip-"))
vmm_panic(level, type, regs, "esr_ec_data_abort_from_a_lower_exception_level");
else
print_vmm_registers(regs);
return 0;
case 0x25: /* Data Abort taken without a change in EL */
vmm_panic(level, type, regs, "esr_ec_data_abort_taken_without_a_change_in_exception_level");
return 0;
default:
return -1;
}
}函数vmm_synchronous_handler首先通过读取ESR_EL2寄存器来获取异常类。
如果是在AArch32或AArch64状态下执行的HVC指令,则调用uh_handle_command函数,app_id在X0中,cmd_id在X1中。
如果是在AArch64状态下的陷阱系统寄存器访问,如果是写入操作,则调用其他_msr_mrs_system函数,函数中包含被写入的寄存器。
other_msr_mrs_system函数将从保存的寄存器中获取被写入的值。
检查被写入的寄存器是否允许写入操作:如果该寄存器不允许被写入,它要么调用uh_panic函数,要么检查新的值是否有效(如果特定位有一个固定的值的话)。
更新ELR_EL2寄存器,使其指向下一条指令。
如果是来自较低异常级别的指令异常。
调用should_skip_prefetch_abort函数。
如果IFSC==0b000111(地址转换错误,第3级)&& S1PTW==1(地址转换错误,第2级)&& EA==0(不是外部异常)&& FnV=0b0(FAR有效)&& SET=0b00(可恢复状态)。
并且如果跳过的预取异常次数小于9。
那么should_skip_prefetch_abort函数将返回1,否则返回0。
如果没有跳过,则调用esr_ec_prefetch_abort_from_a_lower_exception_level函数。
该函数检查故障地址是否为0。
如果是,则将故障注入到EL1中。
同时将CPU编号记录到uh_state的injections数组中。
如果地址不是0,则会死机。
它是来自较低异常级别的数据异常。
它将调用rkp_fault函数来检测RKP故障。
发生故障的指令必须位于内核的text区段中。
发生故障的指令必须是str x2,[x1]。
x1必须指向一个页表项。
如果是第1级PTE,则调用rkp_l1pgt_write函数。
如果是第2级PTE,则调用rkp_l2pgt_write函数。
如果是第3级PTE,则调用rkp_l3pgt_write函数。
让PC指向下一条指令并返回。
如果不是RKP故障,则检查数据故障状态码。
如果DFSC==0b000111(地址转换错误,第3级)。
但它可以对s12e1(r|w)这个故障地址进行转换,则不会死机。
如果DFSC==0b0011xx(权限错误,任何级别)。
但它可以转换出s12e1w的故障地址,则宣布TLB无效。
否则,调用esr_ec_prefetch_abort_from_a_lower_exception_level函数。
和上面一样,注入EL1为0,否则就死机。
如果是来自EL2的指令异常或数据异常,则死机。
crit_sec_t* vmm_panic(int64_t level, int64_t type, saved_regs_t* regs, char* message) {
// ...
uh_log('L', "vmm.c", 1171, ">>vmm_panic<<");
cs_enter(&panic_cs);
uh_log('L', "vmm.c", 1175, "message: %s", message);
switch (level) {
case 0x0:
uh_log('L', "vmm.c", 1179, "level: VMM_EXCEPTION_LEVEL_TAKEN_FROM_CURRENT_WITH_SP_EL0");
break;
case 0x200:
uh_log('L', "vmm.c", 1182, "level: VMM_EXCEPTION_LEVEL_TAKEN_FROM_CURRENT_WITH_SP_ELX");
break;
case 0x400:
uh_log('L', "vmm.c", 1185, "level: VMM_EXCEPTION_LEVEL_TAKEN_FROM_LOWER_USING_AARCH64");
break;
case 0x600:
uh_log('L', "vmm.c", 1188, "level: VMM_EXCEPTION_LEVEL_TAKEN_FROM_LOWER_USING_AARCH32");
break;
default:
uh_log('L', "vmm.c", 1191, "level: VMM_UNKNOWN\n");
break;
}
switch (type) {
case 0x0:
uh_log('L', "vmm.c", 1197, "type: VMM_EXCEPTION_TYPE_SYNCHRONOUS");
break;
case 0x80:
uh_log('L', "vmm.c", 1200, "type: VMM_EXCEPTION_TYPE_IRQ_OR_VIRQ");
break;
case 0x100:
uh_log('L', "vmm.c", 1203, "type: VMM_SYSCALL\n");
break;
case 0x180:
uh_log('L', "vmm.c", 1206, "type: VMM_EXCEPTION_TYPE_SERROR_OR_VSERROR");
break;
default:
uh_log('L', "vmm.c", 1209, "type: VMM_UNKNOWN\n");
break;
}
print_vmm_registers(regs);
if ((get_sctlr_el1() & 1) == 0 || type != 0 || (level == 0 || level == 0x200)) {
has_panicked = 1;
cs_exit(&panic_cs);
if (!strcmp(message, "panic on another core"))
exynos_reset(0x8800);
uh_panic();
}
uh_panic_el1(uh_state.fault_handler, regs);
return cs_exit(&panic_cs);
}vmm_panic函数会记录死机消息,异常级别和类型,如果发生下面的某种情形:
- MMU被禁用;
- 异常不同步;
- 异常来自EL2;
则调用uh_panic函数,否则,就调用uh_panic_el1函数。
void uh_panic() {
uh_log('L', "main.c", 482, "uh panic!");
print_state_and_reset();
}
void print_state_and_reset() {
uh_log('L', "panic.c", 29, "count state - page_ro: %lx, page_free: %lx, s2_breakdown: %lx", page_ro, page_free,
s2_breakdown);
print_el2_state();
print_el1_state();
print_stack_contents();
bigdata_store_data();
has_panicked = 1;
exynos_reset(0x8800);
}uh_panic函数会记录EL1和EL2系统寄存器的值、管理程序和内核堆栈的内容,并将这些内容的文本版本复制到“bigdata”区域,然后重新启动设备。
int64_t uh_panic_el1(uh_handler_list_t* fault_handler, saved_regs_t* regs) {
// ...
uh_log('L', "vmm.c", 111, ">>uh_panic_el1<<");
if (!fault_handler) {
uh_log('L', "vmm.c", 113, "uH handler did not registered");
uh_panic();
}
print_el2_state();
print_el1_state();
print_stack_contents();
cpu_num = get_current_cpu();
if (cpu_num <= 7) {
something = cpu_num - 0x21530000;
if (uh_state.injections[cpu_num] == something)
uh_log('D', "vmm.c", 99, "Injection locked");
uh_state.injections[cpu_num] = something;
}
handler_data = &fault_handler->uh_handler_data[cpu_num];
handler_data->esr_el2 = get_esr_el2();
handler_data->elr_el2 = get_elr_el2();
handler_data->hcr_el2 = get_hcr_el2();
handler_data->far_el2 = get_far_el2();
handler_data->hpfar_el2 = get_hpfar_el2() << 8;
if (regs)
memcpy(fault_handler->uh_handler_data[cpu_num].regs.regs, regs, 272);
set_elr_el2(fault_handler->uh_handler);
return 0;
}uh_panic_el1函数用于填充APP_INIT的命令#0指定的结构体。同时,它还将ELR_EL2设置为相应的处理函数,以便在执行ERET指令时调用它。
深入了解RKP
启动过程
RKP的启动分两个阶段进行,为此将使用两个不同的命令:
- 命令#1 (启动):由内核在start_kernel函数中调用, 它位于mm_init函数之后;
- 命令#2(延迟启动):由内核在kernel_init函数中调用,刚好在启动init之前调用。
RKP的启动命令
在内核端,这个命令在rkp_init函数中调用的,具体代码位于init/main.c中。
rkp_init_t rkp_init_data __rkp_ro = {
.magic = RKP_INIT_MAGIC,
.vmalloc_start = VMALLOC_START,
.no_fimc_verify = 0,
.fimc_phys_addr = 0,
._text = (u64)_text,
._etext = (u64)_etext,
._srodata = (u64)__start_rodata,
._erodata = (u64)__end_rodata,
.large_memory = 0,
};
static void __init rkp_init(void)
{
// ...
rkp_init_data.vmalloc_end = (u64)high_memory;
rkp_init_data.init_mm_pgd = (u64)__pa(swapper_pg_dir);
rkp_init_data.id_map_pgd = (u64)__pa(idmap_pg_dir);
rkp_init_data.tramp_pgd = (u64)__pa(tramp_pg_dir);
#ifdef CONFIG_UH_RKP_FIMC_CHECK
rkp_init_data.no_fimc_verify = 1;
#endif
rkp_init_data.tramp_valias = (u64)TRAMP_VALIAS;
rkp_init_data.zero_pg_addr = (u64)__pa(empty_zero_page);
// ...
uh_call(UH_APP_RKP, RKP_START, (u64)&rkp_init_data, (u64)kimage_voffset, 0, 0);
}
asmlinkage __visible void __init start_kernel(void)
{
// ...
rkp_init();
// ...
}在管理程序端,相应的命令处理程序如下所示:
int64_t rkp_cmd_start(saved_regs_t* regs) {
// ...
cs_enter(&rkp_start_lock);
if (rkp_inited) {
cs_exit(&rkp_start_lock);
uh_log('L', "rkp.c", 133, "RKP is already started");
return -1;
}
res = rkp_start(regs);
cs_exit(&rkp_start_lock);
return res;
}
rkp_cmd_start calls rkp_start which does the real work.
int64_t rkp_start(saved_regs_t* regs) {
// ...
KIMAGE_VOFFSET = regs->x3;
rkp_init_data = rkp_get_pa(regs->x2);
if (rkp_init_data->magic - 0x5AFE0001 >= 2) {
uh_log('L', "rkp_init.c", 85, "RKP INIT-Bad Magic(%d), %p", regs->x2, rkp_init_data);
return -1;
}
if (rkp_init_data->magic == 0x5AFE0002) {
rkp_init_cmd_counts_test();
rkp_test = 1;
}
INIT_MM_PGD = rkp_init_data->init_mm_pgd;
ID_MAP_PGD = rkp_init_data->id_map_pgd;
ZERO_PG_ADDR = rkp_init_data->zero_pg_addr;
TRAMP_PGD = rkp_init_data->tramp_pgd;
TRAMP_VALIAS = rkp_init_data->tramp_valias;
VMALLOC_START = rkp_init_data->vmalloc_start;
VMALLOC_END = rkp_init_data->vmalloc_end;
TEXT = rkp_init_data->_text;
ETEXT = rkp_init_data->_etext;
TEXT_PA = rkp_get_pa(TEXT);
ETEXT_PA = rkp_get_pa(ETEXT);
SRODATA = rkp_init_data->_srodata;
ERODATA = rkp_init_data->_erodata;
TRAMP_PGD_PAGE = TRAMP_PGD & 0xFFFFFFFFF000;
INIT_MM_PGD_PAGE = INIT_MM_PGD & 0xFFFFFFFFF000;
LARGE_MEMORY = rkp_init_data->large_memory;
page_ro = 0;
page_free = 0;
s2_breakdown = 0;
pmd_allocated_by_rkp = 0;
NO_FIMC_VERIFY = rkp_init_data->no_fimc_verify;
if (rkp_bitmap_init() < 0) {
uh_log('L', "rkp_init.c", 150, "Failed to init bitmap");
return -1;
}
memlist_init(&executable_regions);
memlist_set_field_14(&executable_regions);
memlist_add(&executable_regions, TEXT, ETEXT - TEXT);
if (TRAMP_VALIAS)
memlist_add(&executable_regions, TRAMP_VALIAS, 0x1000);
memlist_init(&dynamic_load_regions);
memlist_set_field_14(&dynamic_load_regions);
put_last_dynamic_heap_chunk_in_static_heap();
if (rkp_paging_init() < 0) {
uh_log('L', "rkp_init.c", 169, "rkp_pging_init fails");
return -1;
}
rkp_inited = 1;
if (rkp_l1pgt_process_table(get_ttbr0_el1() & 0xFFFFFFFFF000, 0, 1) < 0) {
uh_log('L', "rkp_init.c", 179, "processing l1pgt fails");
return -1;
}
uh_log('L', "rkp_init.c", 183, "[*] HCR_EL2: %lx, SCTLR_EL2: %lx", get_hcr_el2(), get_sctlr_el2());
uh_log('L', "rkp_init.c", 184, "[*] VTTBR_EL2: %lx, TTBR0_EL2: %lx", get_vttbr_el2(), get_ttbr0_el2());
uh_log('L', "rkp_init.c", 185, "[*] MAIR_EL1: %lx, MAIR_EL2: %lx", get_mair_el1(), get_mair_el2());
uh_log('L', "rkp_init.c", 186, "RKP Activated");
return 0;
}让我们来深入分析一下这个函数:
- 它将第二个参数保存到全局变量KIMAGE_VOFFSET中。
- 就像我们将看到的大多数命令处理程序一样,它将第一个参数rkp_init_data从虚拟地址转换为物理地址,这一步是通过调用rkp_get_pa函数来实现的。
- 然后,检查其magic字段。如果它是测试模式的magic,则调用rkp_init_cmd_counts_test函数,从而允许测试命令0x81-0x88被无限次调用。
- 将rkp_init_data的各个字段保存到全局变量中。
- 初始化一个名为executable_regions的新memlist实例,并将内核的text区段添加到其中,并在提供TRAMP_VALIAS页面时执行相同的操作。
- 初始化一个名为dynamic_load_regions的新memlist实例,这个memlist用于RKP的“动态可执行文件加载”功能(我们将在后文对此进行详细介绍)。
- 调用put_last_dynamic_chunk_in_heap函数(在我们的设备上,最终的结果是静态堆获取了所有未使用的动态内存,而动态堆没有获得任何剩余的内存)。
- 调用rkp_paging_init和rkp_l1pgt_process_table函数,我们将在下面详细介绍。
- 记录一些EL2系统寄存器的值并返回。
int64_t rkp_paging_init() {
// ...
if (!TEXT || (TEXT & 0xFFF) != 0) {
uh_log('L', "rkp_paging.c", 637, "kernel text start is not aligned, stext : %p", TEXT);
return -1;
}
if (!ETEXT || (ETEXT & 0xFFF) != 0) {
uh_log('L', "rkp_paging.c", 642, "kernel text end is not aligned, etext : %p", ETEXT);
return -1;
}
if (TEXT_PA <= get_base() && ETEXT_PA > get_base())
return -1;
if (s2_unmap(0x87000000, 0x200000))
return -1;
if (rkp_phys_map_set_region(TEXT_PA, ETEXT - TEXT, TEXT) < 0) {
uh_log('L', "rkp_paging.c", 435, "physmap set failed for kernel text");
return -1;
}
if (s1_map(TEXT_PA, ETEXT - TEXT, UNKN1 | READ)) {
uh_log('L', "rkp_paging.c", 447, "Failed to make VMM S1 range RO");
return -1;
}
if (INIT_MM_PGD >= TEXT_PA && INIT_MM_PGD < ETEXT_PA && s1_map(INIT_MM_PGD, 0x1000, UNKN1 | WRITE | READ)) {
uh_log('L', "rkp_paging.c", 454, "failed to make swapper_pg_dir RW");
return -1;
}
rkp_phys_map_lock(ZERO_PG_ADDR);
if (rkp_s2_page_change_permission(ZERO_PG_ADDR, 0, 1, 1) < 0) {
uh_log('L', "rkp_paging.c", 462, "Failed to make executable for empty_zero_page");
return -1;
}
rkp_phys_map_unlock(ZERO_PG_ADDR);
if (rkp_set_kernel_rox(0))
return -1;
if (rkp_s2_range_change_permission(0x87100000, 0x87140000, 0x80, 1, 1) < 0) {
uh_log('L', "rkp_paging.c", 667, "Failed to make UH_LOG region RO");
return -1;
}
if (!uh_state.dynamic_heap_inited)
return 0;
if (rkp_s2_range_change_permission(uh_state.dynamic_heap_base,
uh_state.dynamic_heap_base + uh_state.dynamic_heap_size, 0x80, 1, 1) < 0) {
uh_log('L', "rkp_paging.c", 685, "Failed to make dynamic_heap region RO");
return -1;
}
return 0;
}
我们也来分析一下rkp_paging_init函数:
- 对内核的text区段进行一些安全检查。
- 在phys_map中把内核的text区段标记为TEXT(名字是我们自己起的)。
- 在EL2的第1阶段,将内核的text区段映射为RO。
- 在EL2的第1阶段,将swapper_pg_dir映射为RW。
- 在EL1的第2阶段,将empty_zero_page映射为ROX。
- 调用rkp_set_kernel_rox函数,我们将在后面对其进行详细的介绍。
- 在EL1的第2阶段,将日志区段设置为ROX。
- 在EL1的第2阶段,将动态堆区段设置为ROX。
int64_t rkp_set_kernel_rox(int64_t access) {
// ...
erodata_pa = rkp_get_pa(ERODATA);
if (rkp_s2_range_change_permission(TEXT_PA, erodata_pa, access, 1, 1) < 0) {
uh_log('L', "rkp_paging.c", 392, "Failed to make Kernel range ROX");
return -1;
}
if (access)
return 0;
if (((erodata_pa | ETEXT_PA) & 0xFFF) != 0) {
uh_log('L', "rkp_paging.c", 158, "start or end addr is not aligned, %p - %p", ETEXT_PA, erodata_pa);
return 0;
}
if (ETEXT_PA > erodata_pa) {
uh_log('L', "rkp_paging.c", 163, "start addr is bigger than end addr %p, %p", ETEXT_PA, erodata_pa);
return 0;
}
paddr = ETEXT_PA;
while (sparsemap_set_value_addr(&uh_state.ro_bitmap, addr, 1) >= 0) {
paddr += 0x1000;
if (paddr >= erodata_pa)
return 0;
uh_log('L', "rkp_paging.c", 171, "set_pgt_bitmap fail, %p", paddr);
}
return 0;
}在EL1的第2阶段,函数rkp_set_kernel_rox会将[kernel text start; rodata end]之间的内存设置为RWX(是的,RWX对应的访问参数为0,但稍后将使用0x80再次调用该函数,使其变为RO),然后,它更新ro_bitmap,从而把[kernel text end; rodata end]之间的内存标记为RO。
在rkp_paging_init之后,rkp_start函数将调用rkp_l1pgt_process_table来处理页表(主要把3级表变成只读的)。它会根据TTBR0_EL1寄存器的值调用该函数。
RKP的延迟启动命令
在内核端,这个命令将被include/linux/rkp.h文件中的rkp_deferred_init函数所调用。
// from include/linux/rkp.h
static inline void rkp_deferred_init(void){
uh_call(UH_APP_RKP, RKP_DEFERRED_START, 0, 0, 0, 0);
}
// from init/main.c
static int __ref kernel_init(void *unused)
{
// ...
rkp_deferred_init();
// ...
}在管理程序端,相应的命令处理程序如下所示:
int64_t rkp_cmd_deferred_start() {
return rkp_deferred_start();
}
int64_t rkp_deferred_start() {
uh_log('L', "rkp_init.c", 193, "DEFERRED INIT START");
if (rkp_set_kernel_rox(0x80))
return -1;
if (rkp_l1pgt_process_table(INIT_MM_PGD, 0x1FFFFFF, 1) < 0) {
uh_log('L', "rkp_init.c", 198, "Failed to make l1pgt processing");
return -1;
}
if (TRAMP_PGD && rkp_l1pgt_process_table(TRAMP_PGD, 0x1FFFFFF, 1) < 0) {
uh_log('L', "rkp_init.c", 204, "Failed to make l1pgt processing");
return -1;
}
rkp_deferred_inited = 1;
uh_log('L', "rkp_init.c", 217, "DEFERRED INIT IS DONE\n");
memory_fini();
return 0;
}函数rkp_cmd_deferred_start和rkp_deferred_start将执行以下操作:
- 再次调用函数rkp_set_kernel_rox(第一次是在正常启动时调用),但这次是以0x80(只读)作为参数,所以内核的text + rodata区段将在第2阶段被标记为 RO。
- 根据swapper_pg_dir调用rkp_l1pgt_process_table。
- 根据tramp_pg_dir(如果已经设置了的话)调用rkp_l1pgt_process_table。
- 最后调用memory_fini。
RKP的Bitmap命令
内核在启动期间还调用了另外3条RKP命令。
其中有两条命令也是在位于init/main.c文件中的rkp_init函数中调用的:
// from init/main.c
sparse_bitmap_for_kernel_t* rkp_s_bitmap_ro __rkp_ro = 0;
sparse_bitmap_for_kernel_t* rkp_s_bitmap_dbl __rkp_ro = 0;
static void __init rkp_init(void)
{
// ...
rkp_s_bitmap_ro = (sparse_bitmap_for_kernel_t *)
uh_call(UH_APP_RKP, RKP_GET_RO_BITMAP, 0, 0, 0, 0);
rkp_s_bitmap_dbl = (sparse_bitmap_for_kernel_t *)
uh_call(UH_APP_RKP, RKP_GET_DBL_BITMAP, 0, 0, 0, 0);
// ...
}
// from include/linux/rkp.h
typedef struct sparse_bitmap_for_kernel {
u64 start_addr;
u64 end_addr;
u64 maxn;
char **map;
} sparse_bitmap_for_kernel_t;
static inline u8 rkp_is_pg_protected(u64 va){
return rkp_check_bitmap(__pa(va), rkp_s_bitmap_ro);
}
static inline u8 rkp_is_pg_dbl_mapped(u64 pa){
return rkp_check_bitmap(pa, rkp_s_bitmap_dbl);
}我们来看看RKP_GET_RO_BITMAP的命令处理程序。
int64_t rkp_cmd_get_ro_bitmap(saved_regs_t* regs) {
// ...
if (rkp_deferred_inited)
return -1;
bitmap = dynamic_heap_alloc(0x20, 0);
if (!bitmap) {
uh_log('L', "rkp.c", 302, "Fail alloc robitmap for kernel");
return -1;
}
memset(bitmap, 0, sizeof(sparse_bitmap_for_kernel_t));
res = sparsemap_bitmap_kernel(&uh_state.ro_bitmap, bitmap);
if (res) {
uh_log('L', "rkp.c", 309, "Fail sparse_map_bitmap_kernel");
return res;
}
regs->x0 = rkp_get_va(bitmap);
if (regs->x2)
*virt_to_phys_el1(regs->x2) = regs->x0;
uh_log('L', "rkp.c", 322, "robitmap:%p", bitmap);
return 0;
}函数rkp_cmd_get_ro_bitmap将从动态堆中分配一个sparse_bitmap_for_kernel_t结构体,并将其清零,然后传给sparsemap_bitmap_kernel函数,该函数将利用ro_bitmap中的信息来填充该结构体。然后,它将VA放到X0中,如果X2中提供了一个指针,它也将把它放到那里(使用virt_to_phys_el1)。
int64_t sparsemap_bitmap_kernel(sparsemap_t* map, sparse_bitmap_for_kernel_t* kernel_bitmap) {
// ...
if (!map || !kernel_bitmap)
return -1;
kernel_bitmap->start_addr = map->start_addr;
kernel_bitmap->end_addr = map->end_addr;
kernel_bitmap->maxn = map->count;
bitmaps = dynamic_heap_alloc(8 * map->count, 0);
if (!bitmaps) {
uh_log('L', "sparsemap.c", 202, "kernel_bitmap does not allocated : %lu", map->count);
return -1;
}
if (map->private) {
uh_log('L', "sparsemap.c", 206, "EL1 doesn't support to get private sparsemap");
return -1;
}
memset(bitmaps, 0, 8 * map->count);
kernel_bitmap->map = (bitmaps - PHYS_OFFSET) | 0xFFFFFFC000000000;
index = 0;
do {
bitmap = map->entries[index].bitmap;
if (bitmap)
bitmaps[index] = (bitmap - PHYS_OFFSET) | 0xFFFFFFC000000000;
++index;
} while (index < kernel_bitmap->maxn);
return 0;
}函数sparsemap_bitmap_kernel将接收一个sparsemap,并将所有bitmap的物理地址转换为虚拟地址,然后再将它们复制到sparse_bitmap_for_kernel_t结构体中。
实际上,函数rkp_cmd_get_dbl_bitmap和rkp_cmd_get_ro_bitmap非常相似,区别在于:前者发送的不是ro_bitmap的bitmap,而是dbl_bitmap的bitmap。
第三条命令rkp_cmd_get_rkp_get_buffer_bitmap也是用来检索sparsemap,即page_allocator.map。它是被内核中的rkp_robuffer_init函数(位于init/main.c文件中)所调用的。
sparse_bitmap_for_kernel_t* rkp_s_bitmap_buffer __rkp_ro = 0;
static void __init rkp_robuffer_init(void)
{
rkp_s_bitmap_buffer = (sparse_bitmap_for_kernel_t *)
uh_call(UH_APP_RKP, RKP_GET_RKP_GET_BUFFER_BITMAP, 0, 0, 0, 0);
}
asmlinkage __visible void __init start_kernel(void)
{
// ...
rkp_robuffer_init();
// ...
rkp_init();
// ...
}
// from include/linux/rkp.h
static inline unsigned int is_rkp_ro_page(u64 va){
return rkp_check_bitmap(__pa(va), rkp_s_bitmap_buffer);
}综上所述,这些bitmap被内核用来检查某些数据是否受到RKP的保护(分配在只读内存页上),如果是这样的话,内核就需要调用相应的RKP命令进行相应的修改。
小结
在本系列文章中,我们将为读者深入讲解三星手机的内核防护技术。在本文中,我们为读者介绍了系统的异常处理过程,以及RKP机制相关的命令,在后续的文章中,会有更多精彩内容呈现给大家,敬请期待!
(未完待续)






发表评论
您还未登录,请先登录。
登录