

前言
这是本系列文章(可能会有三篇)的第一篇。
代码放在BitBucket:https://bitbucket.org/MostThingsWeb/temper-bridge/src/master/main/
大约在一年前,我决定把我的spring旧床垫换成TEMPUR-Contour Elite Breeze,它非常好用。我还给它选了一个可调节的底座(这个),这个也很好。它配有一个遥控器,如图所示:

这个底座宣传的另一个功能是可以通过Android和iPhone应用进行控制。不幸的是,它的Android应用自2014年以来就没有再更新过了,所以我无法用我的Google Pixel进行控制,根据评论可知,我不是唯一一个。很明显,这需要DIY。
项目目标
- 创建一个使用自己的RF(Radio Frequency, 射频)协议与底座通信的网关。
- 开发一个Android应用,可以通过网关控制底座(下次)
类似项目
实现类似目标的其他项目可分为两类:
- 与车载WiFi模块通话((例如:https://github.com/docwho2/java-alexa-tempurpedic-skill)
- 将继电器集成到现有的遥控器中来模拟按钮按下的效果(例如:http://www.quadomated.com/technology/automation/diy-tempurpedic-ergo-adjustable-bed-automation/ , https://github.com/tomchapin/tempurpedic-remote-relay)
改变实际的RF协议的好处是:第一,不依赖于集成的WiFi;第二,不具有破坏性。
研究FCC文档
由于遥控器是一种无线设备,所以它是由FCC(
美国联邦通信委员会)规范的。我们可以查找FCC ID(UNQTPTAES)来了解有关该设备的一些有用信息。由于制造商的保密要求,我们无法获得BOM、原理图和结构图。在这种情况下,最有用的文档是测试报告。

下面是测试报告中一些有趣的摘录。
在第7页中,我们了解到在信道数和频率之间存在某种映射关系。该遥控器支持很多信道,这对于那些有多个底座的人来说很有用。

在第12页我们可以看到我们即将分析的信号:

第13-14页,遥控器通过无线电传送信息,例如按键信息。这意味着底座和遥控器遥控器之间没有持久的连接,而且通信可能是单向的(遥控器 => 底座)。这是有意义的,因为底座不需要和遥控器对话。

软件无线电(Software-DefinedRadio,SDR)的初步研究
除了实际使用外,我还打算借这个项目的机会尝试使用SDR。尽管如此,在这里我不打算教授任何概念。
我选择的工具是HackRF One(Amazon链接)。使用测试报告作为指南,通过SDR#相对来说很容易就能找到信号:

右边是测试报告信号图,我们可以看到这两个信号非常接近,说明我们的方法是正确的。
结果表明,这里使用的调制方式是高斯频移键控(Gaussian frequency shift keying)。非常感谢我的朋友Tim让我知道这是FSK(频移键控, Frequency-shift keying)。
监听SPI(Serial Peripheral Interface, 串行外设接口)总线
我使用GNU Radio来解调信号(在这里我不讨论这个问题,主要是因为我缺乏就这个问题发言的能力)。最后我厌倦了它,并查找一种更快的方式来逆向分析信号。
为此,我选择了Saleae逻辑分析仪(我用的是旧版;新版:Amazon)。拆开遥控器,你会看到一个Si4431射频收发器:

还有一个Renesas单片机:

尝试dump uC的ROM并逆向分析固件很有吸引力,但是根据FCC早期的测试报告可以知道ROM保护被启用。也许下次我们可以试一试,因为存在这样的PIN绕过技术:https://github.com/q3k/m16c-interface
但就目前而言,我们只是打算简单地监听连接uC和射频收发器的SPI总线。该总线用于配置射频芯片和传输数据。Si443x的数据表展示了很多可配置的设置:https://www.silabs.com/documents/public/data-sheets/Si4430-31-32.pdf
我们将在初始化期间(即安装电池后)捕获总线上的流量来了解是uC如何配置收发器的。这将揭示调制方法(剧透一下:即GFSK)和其他我们模拟遥控器需要的参数。方便起见,我编写了一小段解析SPI流量的Python脚本(在Saleae logic中导出为CSV文件),并显示寄存器读写:

流量展示了关于调制方法的一些细节。请注意,在本例中,我的遥控器被设置为9345信道,这就是它传递的方式。
- GFSK
- 标称载波频率:434.5856250 MHz(同样地,这取决于信道)
- 数据速率:12.8kbps
- 频偏(Frequency deviation):25 kHz(相当于50 kHz带宽)
标称载波频率是中心频率的别称。所以,9345信道占用了[434.585 MHz-25 kHz,434.585 MHz+25 kHz]频段。
计算信道映射
那么遥控器是如何从“9345信道”得到434.5856250 MHz的呢?这个问题困扰了我大约两天。这不是简单的线性关系。我收集了几十个初始化序列,每次都有不同的(随机)信道号,并试着查找其中的联系。
不作进一步说明,最后的答案是下面的分段函数:

它并没有看上去那么糟糕。事实上,我唯一需要弄清楚的是分段的部分:

红色的部分对应于Si443x中的fc(frequency center,频率中心) 寄存器。因此,当用户改变射频信道时,uC需要做的就是调整收发器,只需改变fc寄存器。
上面的公式是从数据表中的这个公式推导出来的:

旁注:Si443x跳频
Si443x有一个简单的特性,允许你从单个信道选择寄存器进行信道切换。首先设置标称载波频率,然后设置信道步长(增量>=10 kHz)。它通常用于定时关键应用,如跳频。那么为什么Tempur pedic遥控器不使用它呢?由于该系统支持9999个信道,所以10 kHz的信道步长太大了。遥控器信道方案采用~156.2 Hz信道步长。
Si443x包结构
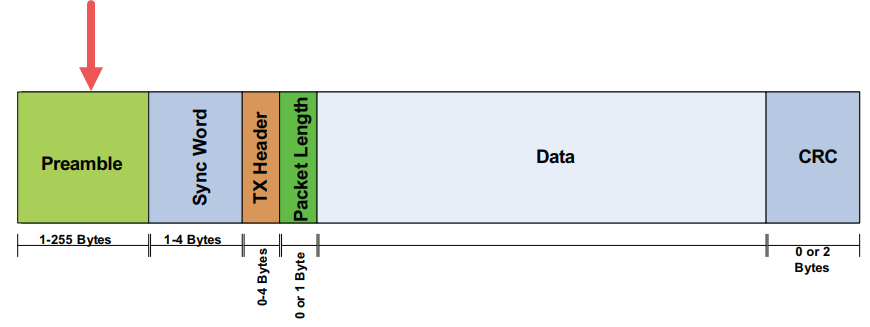
回想一下我们如何处理突发通信(burst communication)。这意味着接收方需要随时准备好并侦听数据。像遥控器这样的设备怎样才能以一种高效的方式做到这一点呢?回答:前导码(preamble)(“唤醒”接收者)和同步字(sync-word)组合。

前导码(preamble)
前导码被设计为既“容易”发现,又不太可能被随机接收。常见的选择是1和0的交替序列。Tempul-Pedic遥控器使用这个序列,长度为40位。
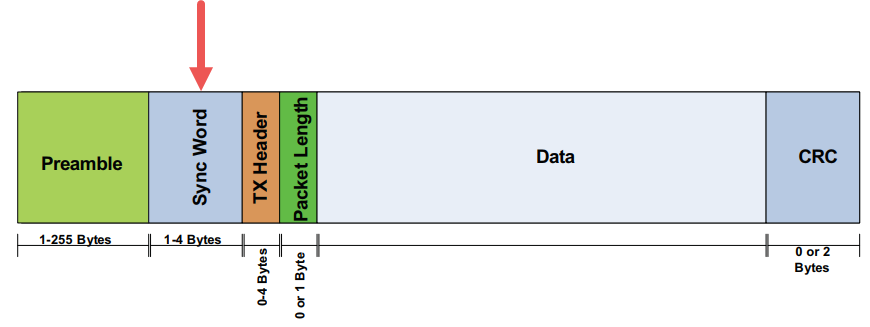
同步字(sync-word)
前导码检测器可以在前导码中唤醒收发器。它如何知道数据的实际来源?这就是同步字的意义所在。在检测到前导码后,接收机在(可配置)一段时间内搜索同步字。
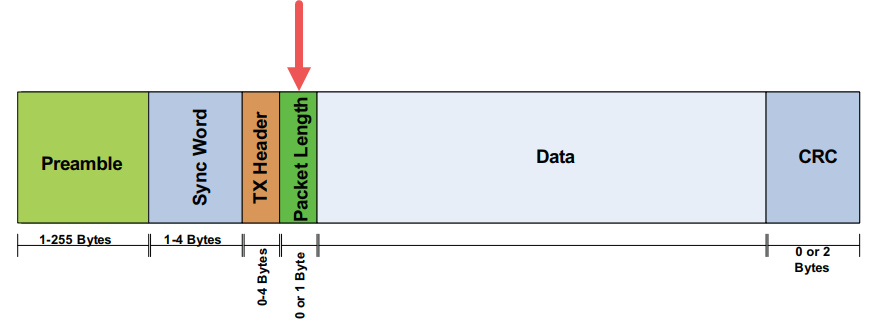
包长
Si443x可以选择固定或可变长度模式。在这个例子中,遥控器使用可变长度模式,虽然我看到的来自它的所有数据长度都相同。因此,我们需要处理数据包长度报头。
数据和CRC(Cyclic Redundancy Check, 循环冗余校验)
CRC是一种检测收发器错误的完整性校验。它是由Si443x进行处理的。
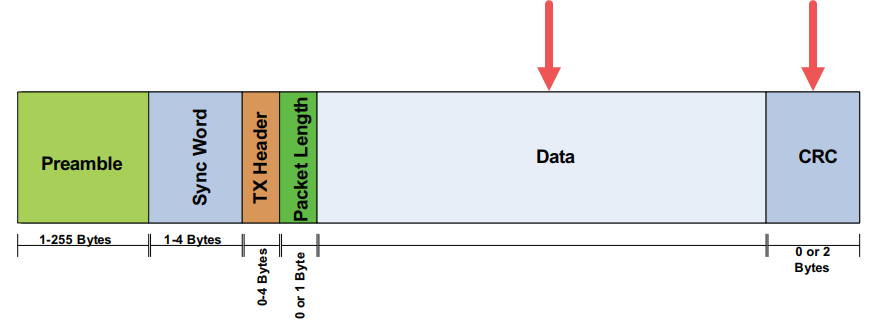
数据
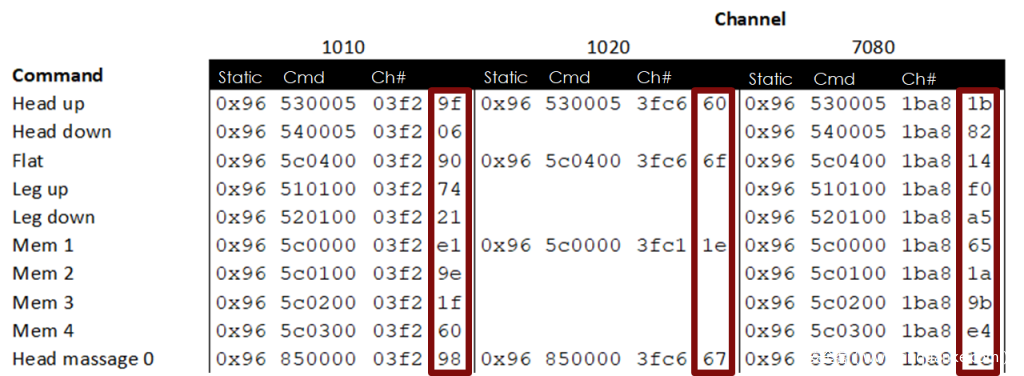
现在终于是时候分析遥控器实际发送的数据了。这是我用来解码协议的摘录表格。我把遥控器调到不同的信道,并按下各个按钮。
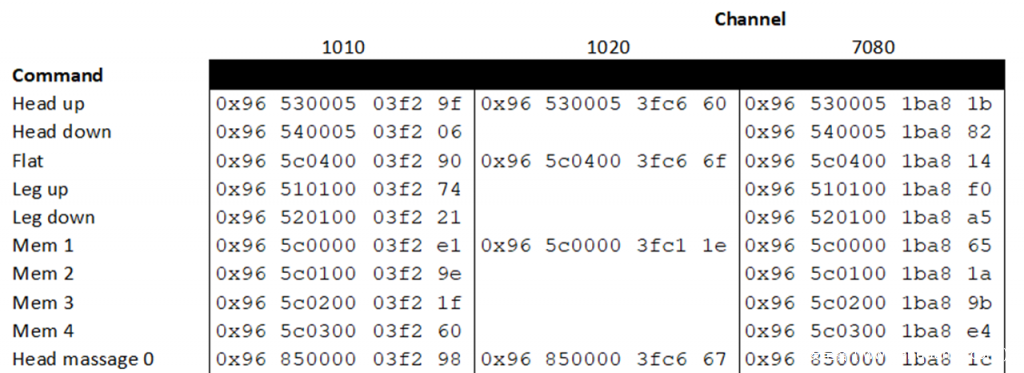
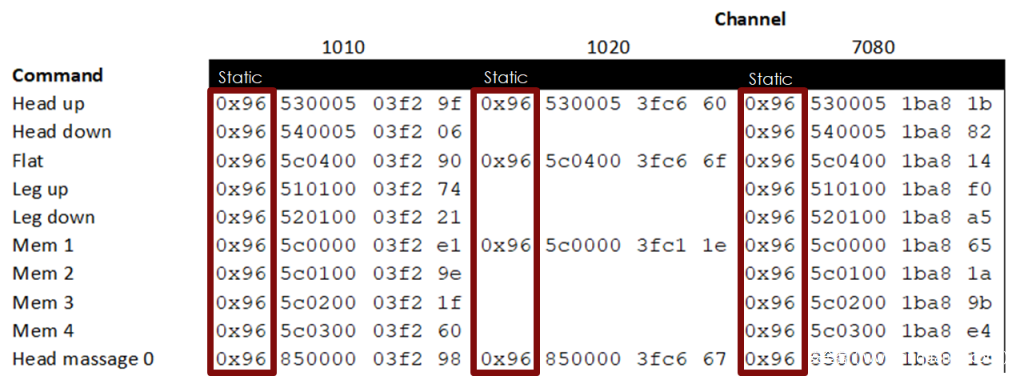
很快我们就可以看到,每个传输在0x96开始,与信道和命令:
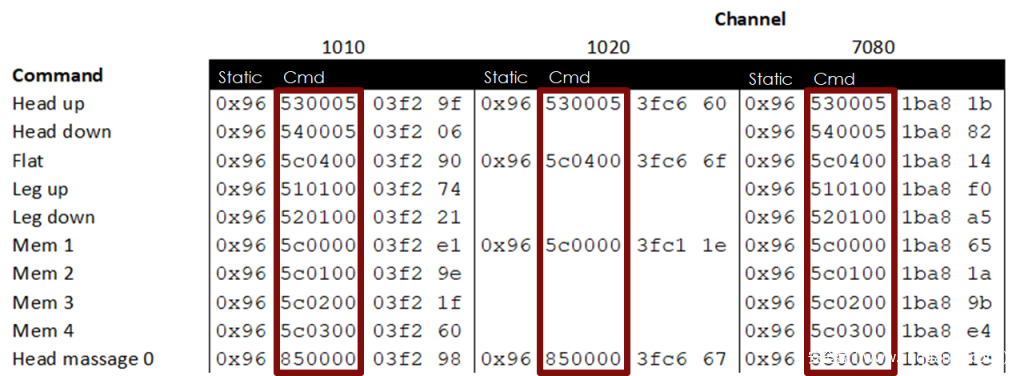
接下来的三个字节与信道无关,与命令有关。
接下来的两个字节是信道号。例如:0x03F2 == 1010(10)
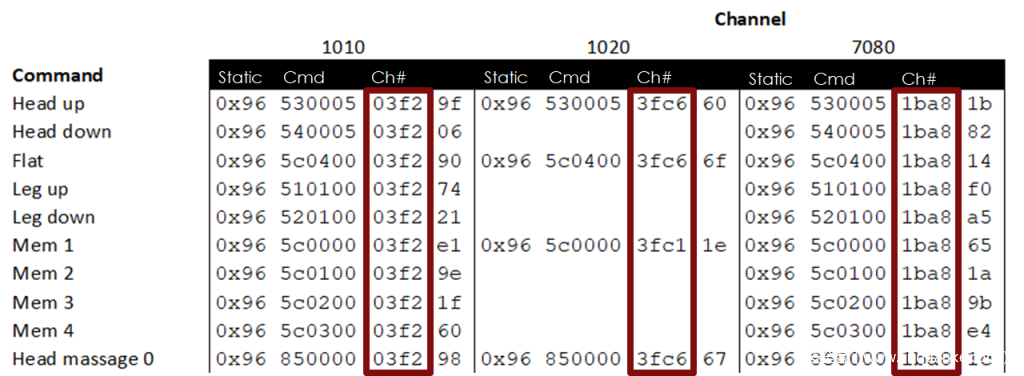
但最后那部分呢?这显然与命令和信道都不相关。
逆向CRC
结果表明,每个传输中的最后一个字节是另一个CRC。但是哪一个呢?没有一个是共同的。值得庆幸的是,有一些逆向CRC的工具。我选择了这个:http://reveng.sourceforge.net/
你所需要做的就是给它一个输入(数据)=>输出(CRC)的映射,它将强制执行CRC参数。我得到的输出如下图所示:

参数:width=8, poly=0x8D, init=0xFF, refin=false, refout=false, xorout=0x00, check=0xFD, residue=0x00, name=(none)
“name=(none)”部分意味着这组参数不对应于任何熟悉的CRC。
回想一下,Si443x已经有了自己的CRC。为什么遥控器要用另一个呢?我的猜测是,工程师们选择添加这个应用级别的CRC,用来防止uc和收发器之间的数据损坏。例如,假设SPI总线上的一些噪声导致收发器“看到”uC打算发送的不同数据。收发器无法知道这一点,所以它会尽职尽责地传送它。底座的接收器可能识别也可能不识别损坏的命令。应用级别的CRC确保可以检测到SPI总线上的传输错误。
“突发”命令
遥控器上的大多数按钮似乎没有去抖动(debounce)功能。例如,当按下诸如STOP或FLAT之类的命令时,遥控器实际上会将其发送一至三次(根据我的经验)。这是一件好事,因为它增加了接收方实际接收命令的可能性。这些类型的命令是幂等的,所以即使底座接收到多个相同的命令也没关系。
用来抬高/降低腿部和头部的按钮被按下时,会使相应的命令被重复传送,直到按钮松开为止。
按摩按钮
按摩按钮是个有趣的例子。这六个按钮可以增大/减小腿部、腰椎和头部区域的按摩强度。最开始,我猜测它们是通过每个按钮对应一个命令来实现,就像抬高/降低腿部/头部的按钮一样。但事实上它更加复杂。
底座有11个按摩强度,介于0到10之间,0为关闭。遥控器记录每个区域的当前按摩强度。当用户点击“+”或“-”按钮时,遥控器发送一个对区域和新按摩强度进行编码的按摩命令。换句话说,它传递绝对的按摩强度。这意味着它实际上有33个离散命令来实现遥控器的按摩按钮(11个级别*3个区域)。这与抬高/降低腿部/头部的按钮形成对比,后者仅仅传递相对定位命令(“+1”或“-1”)。
那么为什么按摩功能会这么复杂?这是我的理论,在前面的“突发命令”一节中,我们了解到遥控器发送多次命令,以便提高正确接收命令的概率。这对于幂等命令来说很好,比如STOP、FLAT等。对于抬高/降低腿部/头部的按钮来说,这也是很好的,因为它们的位置划分得非常细,用户按下抬高腿部按钮可能不会注意到+1或+3的差别。但由于按摩只有11个级别,如果有一次“增加腰部按摩强度”添加了+1,而下一次添加了+3,用户肯定会注意到差别。
自动选择信道
系统的一个有趣的特性是能够自动选择信道。要做到这一点,需要按住FLAT和STOP按钮10秒,然后按下STOP按钮。遥控器的液晶显示器在显示新的射频信道时会闪烁。当它闪烁时,拔掉底座插头然后重新连接。如果操作正确,底座中的继电器会确认新信道。
当遥控器闪烁显示新信道时,实际上它是在内部通过一个特殊的广播信道5568(fc = 25088, frequency = 433.9200000 MHz)发送信道号。根据推测,底座插入电源后会立即收听这个信道。
注:系统的一个限制是,射频信道是完全随机的,尽管有9999个可能的信道,但可能会发生碰撞。
制作接收器的原型
理解协议后,我尝试建立一个接收器,它可以解码我的Tempur-Pedic遥控器命令。我选择了下面的Si443x收发器作为原型:https://www.tindie.com/products/modtronicsaustralia/rfm22b-wireless-breakout-board-800m-range/($22.95). 最后,我实际上将选择Si446x(示例),因为Si443x已经停产。
我使用的单片机(Microcontroller)是ESP32(21.95美元):https://www.sparkfun.com/products/13907。这是一个完美的选择,因为它支持蓝牙、低功耗和WiFi,我计划在这个项目的下一部分使用这两种功能,在这个项目中,我会开发自己的Android应用来控制我的底座。
可以在这里找到(还在开发中)代码:https://bitbucket.org/MostThingsWeb/temper-bridge/src/master/main/
我很快就会发布更多的细节(希望如此)。
下一步
接收端代码已基本完成,所以接下来我将处理的发射器部分。然后,我将开发蓝牙低功耗(Bluetooth Low Energy)接口和一个Android应用。







发表评论
您还未登录,请先登录。
登录