
一. 前言
大家好,我是来自银基安全实验室的Cure。 今天与大家分享在纯软件环境下进行AVR固件逆向破解的一些学习与思考。
AVR单片机是Atmel公司于1997年推出的RISC单片机。其中,RISC意为精简指令系统计算机。与CISC(复杂指令系统计算机)不同,RISC优选使用频率最高的简单指令,避免复杂指令,并固定指令宽度,减少指令格式和寻址方式种类,从而缩短指令周期,提升运行速度。一般地,AVR系列单片机具备1MIPS(百万条指令每秒)的高速处理能力。
AVR单片机具有多个系列,包括低档的ATtiny、中档的AT90和高档的ATmega,每个系列又包括多种产品。它们基本结构和原理相互类似,编程方法相同,而在功能和存储容量上则存在很大的差异。AVR单片机系列齐全,能够适用多种不同的场合。
作为IoT设备与传统嵌入式设备十分常见的处理器芯片,AVR程序的安全问题近年来越发得引起了人们的重视,相应的CTF挑战题目也层出不穷。然而,AVR程序的学习,尤其是其逆向技术的学习,往往需要价格昂贵的硬件开发板和一系列复杂的硬件调试工具链,为初学者带来了诸多的限制。本文通过AVR相关的CTF试题,从纯模拟工具与静态分析工具出发,详细地复现已知的基于模拟工具的解题思路,以为对该领域有兴趣的小伙伴们提供些许参考。
二. 工具准备
本文所复现的方法中,主要用到的静态分析工具为radare2,这是一个能够在command环境下运行的二进制分析工具,支持多种平台代码的反汇编,也集成了人性化的命令行界面。
Debian系列Linux环境中,radare2的安装十分便捷:
- $ sudo apt-get install radare2
本文主要用到的动态分析工具为simavr和avr-gdb。
simavr,如其名称是一个软件的AVR模拟器。该模拟器基于avr-gcc,故尤其适用于Linux环境。simavr已能够比较完善地支持128KB以下大小flash组件的模拟,而对于更大的flash空间也具备一定的支持能力。simavr能够直接加载elf文件运行,也支持hex文件的运行。
Debian系列Linux环境中,simavr的安装步骤如下(推荐采用编译方式安装)
- $ sudo apt-get install gcc make gcc-avr avr-libc libelf-dev
- $ git clone https://github.com/buserror/simavr.git
- $ cd simavr
- $ make all
avr-gdb则是AVR环境下的gdb调试工具,其使用与常规x86环境下的gdb类似。Debian系列Linux环境中,可以通过apt-get install进行安装。
- $ sudo apt-get install gdb-avr
其他涉及到的工具主要为binutils-avr,同样可以通过apt install命令进行安装。binutils-avr工具包所包含的avr-objcopy支持对avr文件进行跨格式的复制、转换,例如从hex格式复制为bin格式文件等。binutils-avr中的avr-objdump同样能够将二进制代码反汇编,只是相对于radare2的反汇编效果而言,比较粗糙,且未集成人性化的分析功能组件。
三. 探索之旅
本文采用的题目是Flare On 2017年的第9题,其中,给出的素材是一个能够直接加载到开发板进行运行的hex文件。按照CTF题目的惯例,目标是找到解密后的某字符串。
3.1 模拟运行
面对该hex文件,首先自然想到的,是使用simavr工具将其加载运行看看具体效果。然而,simavr的执行需要指明所采用的具体处理器型号,以精确地进行模拟,如何获得处理器型号呢?抛开暴力遍历,我们不妨采用以下过程。
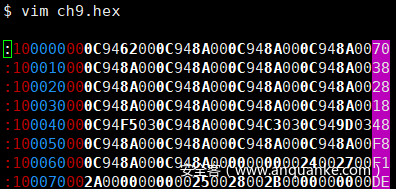
第1步:使用vim或其他编辑工具打开该hex文件,发现其每行形如 :1000…,这是典型地intel hex格式。
第2步:利用avr-objcopy工具,将hex格式的文件转为bin格式文件。

第3步:利用strings命令,从bin文件中尽可能提取线索性信息。
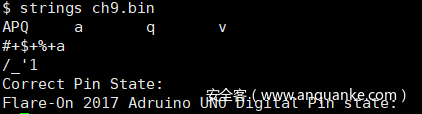
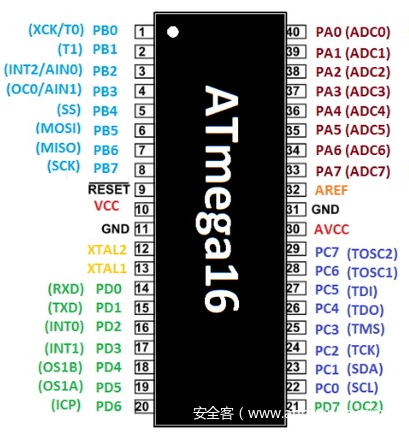
其中,关键线索为Adruino UNO字符串,Arduino UNO是一个基于ATmega328p处理器、采用Atmel AVR指令集平台,因而,我们提交给simavr的机器型号应是atmega328p。
第4步:模拟运行
利用simavr工具中的run_avr子工具,指定机器型号为atmega328p,频率为16000000,成功运行程序。

3.2 静态分析
试探性地,我们使用radare2工具加载bin格式文件进行分析,看看能否找到有价值的线索。
第1步:加载bin文件
第2步:使用aaaaa命令进行初步分析
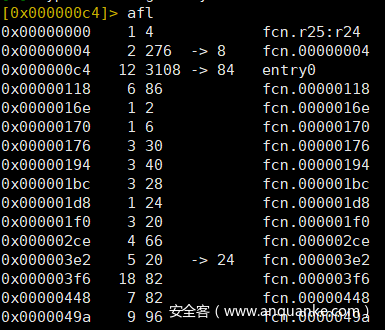
第3步:使用afl命令列出所有函数(截图中仅给出部分),其中我们感兴趣的是位于0x000000c4(黄色文字)处的entry0函数,它是整个程序的核心入口。
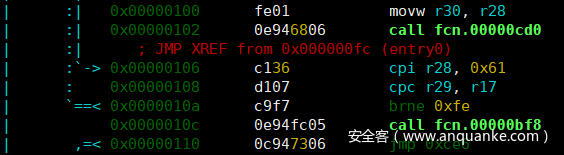
第4步:使用radare2的pd @ <function name>功能,对entry0函数进行反汇编,查查看其代码。

…
…
在进行一些环境、栈相关的初始化之后,entry0呈现了两个线索性的函数调用,分别位于0xcd0和0xbf8。
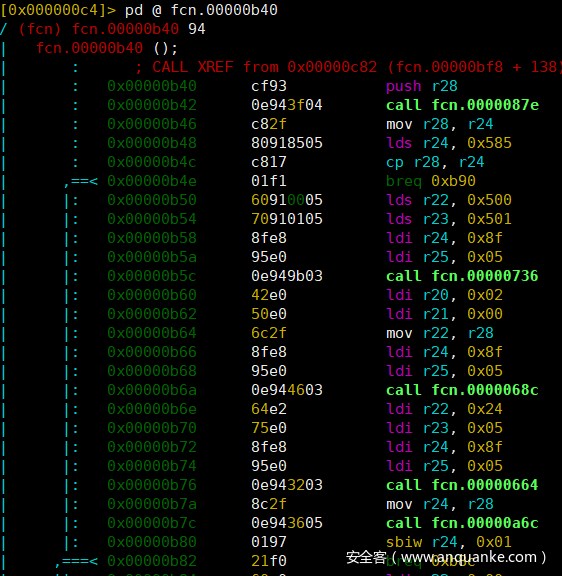
第5步:继续使用pd @ <function name>,对内容相对更丰富、线索性更强的0xbf8处的函数进行考察,找到3个分支函数。

第6步:在探索过程中,发现fcn.00000b40调用了fcn.00000ac6,其中,将r28寄存器的内容录入r24寄存器作为参数。
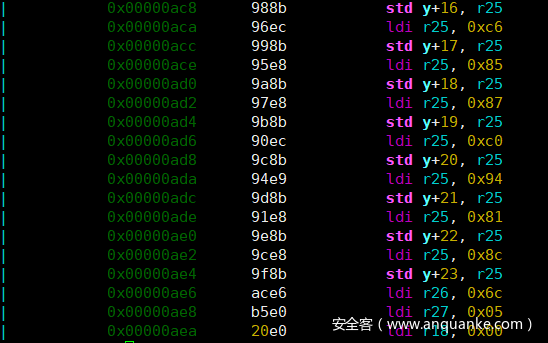
而fcn.00000ac6中含有明显的字符串录入(共计23个字符,这里仅给出部分)
…
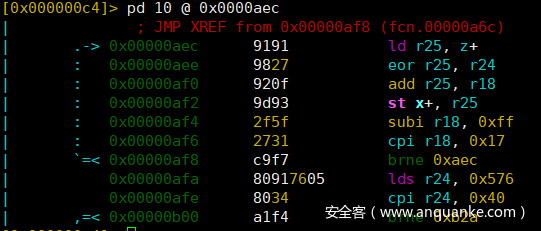
更重要的是,其后存在有比较明显的校验操作,该操作决定了后续的跳转分支。通过pd <number of lines> @ <line number>,反汇编0x00000aec处的代码,得到以下。
下面对这步可能发生的事情进行推断:
① 0xb7a处,将r28内容录入r24,并以r24作为参数,调用fcn.00000a6c;
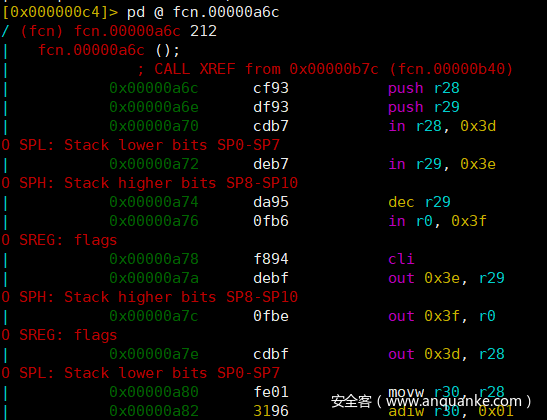
② fcn.00000a6c中,先通过0x3d和0x3e这两个典型的SPL/SPH I/O寄存器的读写分配了栈空间,再将23个字符录入到该栈空间(此时0x00000ae4执行完毕);
③ fcn.00000a6c中,继续将r27:r26(也即AVR体系中的x寄存器)设定为0x056c(此时0x00000ae8执行完毕)
④ 0x00000aea起,以r18中存储的0x17(即十进制23)为循环,通过z指针(最初指向栈上首字节,见0x00000a80和0x00000a82代码)分别操作每个栈上的字符,并将结果按顺序录入到由x指定的0x00000576起的空间中。其中,操作过程中eor所使用的r24即0xb7a中传入的参数,可以认为是key,而栈上的原始数据即为密文,整个操作过程即解密过程,解密结果放在0x56c起的空间里。
⑤ 验证解密结果的正确性,具体地,将0x576处的字符(解密结果中的第11个字符)与0x40对比,并根据比对结果决策分支。推测,当key错误时,分支即3.1章节中默认的Pin State输出。
3.3 动态调试
使用simavr,通过动态调试方法,尝试改变0x00000b7a处录入到r24中的参数值,考察输出的变化。
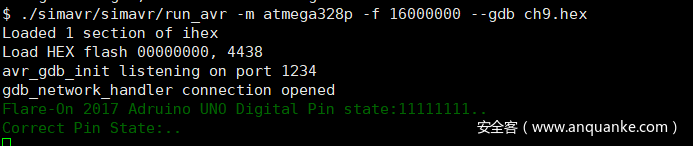
第1步:使用–gdb选项启动simavr的run_avr子工具。

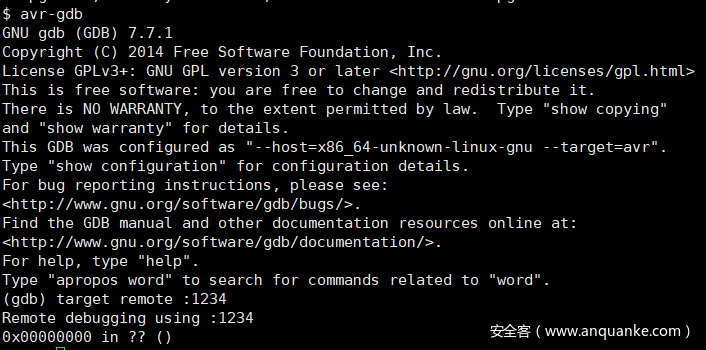
从输出可以看出,run_avr提供了一个gdb server,其监听的端口是本地的1234端口。
第2步:启动avr-gdb工具,并通过target remote :1234与gdb server建立连接。
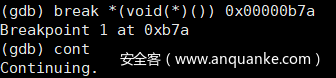
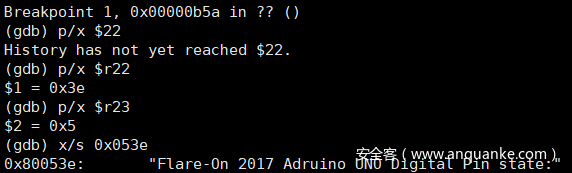
第3步:通过break命令,在0x00000b7a处设置断点,再通过continue命令,运行至断点处。
第4步:查看当前寄存器r28的值,并尝试将该值设置为其他值,并在0x00000afe处设置断点,再通过continue继续执行,以观测效果。以上几步可以通过脚本自动化进行,当输入正确的r28值(0xdb)时,效果如下,此时可以通过输出0x0000056c处的内容获取解密结果。
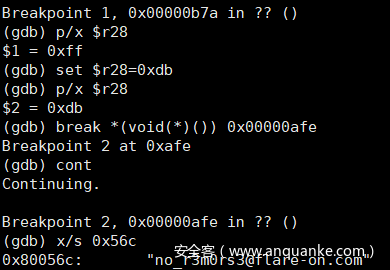
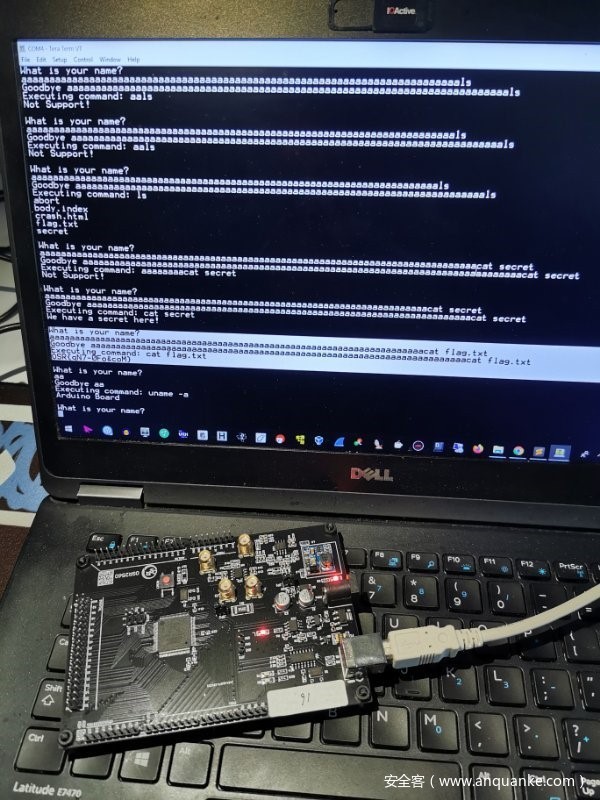
相应地,继续continue,能够看到程序完整输出。
至此,获得本题答案为no_r3m0rs3@flare-on.com。
四. 头脑风暴
前面的分析中,先使用了纯静态分析铺垫,再使用了动态调试收尾。这是一种方法,但绝非唯一的方法。下面,分别从“动静结合”的角度,阐述一些解决问题过程中的实用技巧。
举例而言,第3.2章节的调试过程中,我们的函数fcn.00000b40实际包含着多个调用,具体为fcn.00000736、fcn.0000068c、fcn.00000664和fcn.00000a6c。而我们则直接将关注点定位到了fcn.00000a6c。
从静态分析的角度,这是因为fcn.00000a6c中含有明显的字符串录入操作;实际上,从动态调试入手,也可以将关注点缩减至相同的位置。
具体地,首先中断在例如0xb5c处,查看fcn.00000736函数的输入参数。
显然,r23:r22中包含的是指向Flare-On …字符串的指针,那么,不妨优先猜测,该函数的作用是输出Flare-On … 字符串,并以冒号结尾。于是,接下来的fcn.0000068c则大概率是在输出pin state,即3.1中的111… 。这样,就相对容易地排除了一部分无需关注的函数,减轻了进一步定位关键函数的难度。
五. 结语
AVR体系架构由来已久,凭借其精简高效的运行机制,为IoT与嵌入式行业所青睐。目前,业界对AVR体系的逆向研究远不如x86、arm等大牌体系结构深入,但随着近年来智能设备的兴起、汽车零配件的日益复杂化,AVR体系的安全成为了业界越发感兴趣且不得不关注的领域。
本文基于已有的安全考题,对已知的基于纯软件方式的解法进行复现,起到一个抛砖引玉的作用,也期待为苦于没有开发板与硬件工具链但对AVR安全有所兴趣想要学习、尝试的小伙伴提供些许思路。
目前,小伙伴们正在对深圳纽创信安(Open Security Research, OSR)CTF展开相关探索,之后还有更多内容与大家分享、交流。
参考文献
https://github.com/radareorg/radare2
https://github.com/buserror/simavr
http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-7810-Automotive-Microcontrollers-ATmega328P_Datasheet.pdf
https://www.fireeye.com/content/dam/fireeye-www/global/en/blog/threat-research/Flare-On%202017/Challenge9.pdf
https://www.systutorials.com/docs/linux/man/1-avr-gdb/







发表评论
您还未登录,请先登录。
登录